2024年12月9日
ワーム型ロボットと地中レーダーなどを統合した点検プラットフォームの創造
株式会社タウ技研、東京工科大学、KISTEC電子技術部
近年、人の立入が制限される災害現場や立入が困難なインフラ点検現場へのロボット技術の適用が進んでいます。それらの代表的な機器としてドローンが挙げられますが、ドローンによる画像探査等では不十分なケースも出ています。
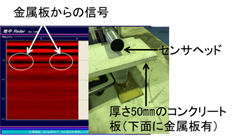
本研究では、より近接した点検を実施するため、東京工科大学の外部推進式ワームロボット技術と(株)タウ技研のレーダー等によるセンシング技術を統合した研究を実施し、KISTECによる支援を受けながら、(株)タウ技研による事業化が進められています。初年度は、センサヘッド部の開発とワームロボットの小型化に取り組み、試作機を完成させました。2年目は、各関節の統合駆動ソフトのブラッシュアップ、レーダーセンシングに対応できるトリガシステムの構築により、レーダーによる試験探査チャート出力を実現しました。