次世代医療福祉ロボットグループ
現代の超高齢化社会において、人間の動作を物理的に補助する新ロボット技術の研究開発が強く望まれ ています。人との身体的な接触が必要となる支援動作では、優しく柔らかな動作が不可欠です。人間の意図に反さず優しく接触するための繊細な力加減の制御が人間支援実現の鍵となります。本グループ では、力触覚技術(ハプティック)を搭載したロボットを医療や福祉分野に展開することを目指して研究開発を進めています。
期間
- (戦略的研究シーズ育成事業) 「機能性ハプティックアクチュエータの創製」 2015年4月~2016年3月
- (有望シーズ展開事業)「力を感じる医療・福祉介護次世代ロボット」プロジェクト 2016年4月~2020年3月
- (実用化実証事業) 「次世代医療福祉ロボット」グループ 2020年4月~
実施場所
Research Gate Building TONOMACHI(慶應義塾大学殿町タウンキャンパス)
神奈川県川崎市川崎区殿町
研究概要
現在日本が直面している超高齢社会では、高齢者の増加やそれに伴う若年介護者の需要増により生産人口の減少が課題となっています。このような背景から、人間の動作を物理的に補助する新ロボット技術の研究開発が強く望まれ ています。
しかしながら、人間支援にはこれまで産業用ロボット技術で培われてきた力強く頑強で精密な動作のみでは対応しきれない場面が多く現れます。これは人との身体的な接触が必要となる支援動作では、優しく柔らかな動作が不可欠となるからです。人間の意図に反さず優しく接触するための繊細な力加減の制御が人間支援実現の鍵となります。このような機能を実現するために、力触覚(ハプティック)技術を実装したロボットの開発が行われています。
次世代医療福祉ロボットグループ では、この力触覚技術を搭載したロボットを医療や福祉分野に展開することを目指して研究開発を進めています。
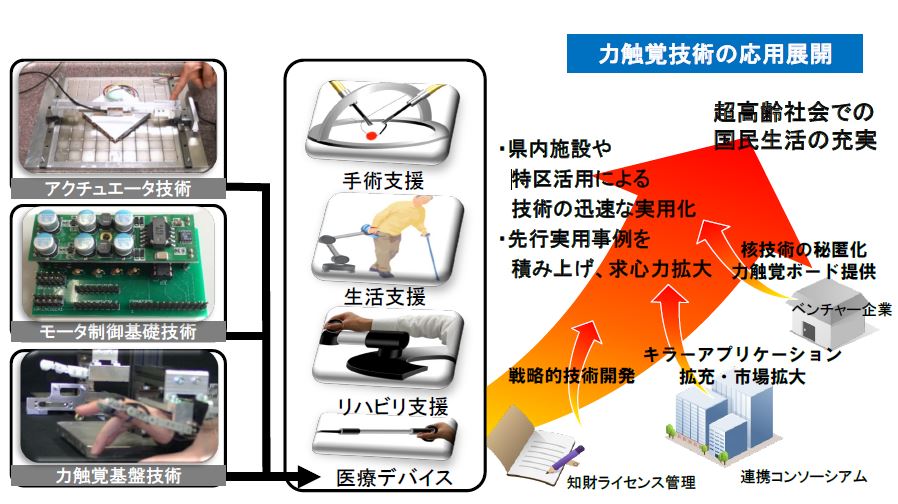
戦略的研究シーズ育成事業(平成27年度)では、力触覚技術の実装においてロボットで利用するアクチュエータの基本性能が非常に重要であることから、力触覚技術実装に適した新たなアクチュエータの研究開発を行ってきました。
有望シーズ展開事業「力を感じる医療・福祉介護次世代ロボットプロジェクト」(平成28年度~令和1年度)では、これらのアクチュエータ技術に加えて、力触覚基盤技術、モータ制御技術および生活支援応用技術を結集し、超高齢社会に必要とさ れる医療・福祉・介護を支援する実用的な次世代支援ロボットの開発を行いました。
実用化実証事業「次世代医療福祉ロボットグループ」(令和2年度~)では、これまで開発を進めてきたロボットの実用化に向けて更なる研究開発や性能評価、臨床試験を行っていきます。
研究内容
1. 医療デバイスの開発
力覚機能を有する鉗子・鑷子ロボットや整形外科ドリル等の医療デバイスを試作し、性能評価試験および臨床試験を実施しています。力触覚技術を援用することで、デバイスが受けた感触を増幅し医師に伝えるなど、医師の作業を支援する事が可能です。医療現場においては髪の毛よりも細く、とても千切れやすい糸で毛細血管の吻合を行うなど、非常に繊細な手の感覚が要求される場面が多々あります。本グループで開発したロボットの活用により、安全性を高めるとともに医師の受ける精神的・身体的負担を軽減する事を目指しています。

2. 医療支援デバイスの開発
医療デバイスにセンサ等を取り付けることで、使用状況をモニタリングしながら正確な使用方法で用いられているか判定を行い、使用者に改善を促すことができます。本グループでは気管支喘息,COPD等の治療に用いられる吸入器に取り付ける吸入動作正誤判別デバイスを開発しています。デバイスで取得したデータをアルゴリズムにより分析・正誤判定を行い結果をフィードバックする事で、医師による患者への臨床指導の支援や治療効果の向上を目指しています。
3. 手術支援ロボットの開発
従来の医療ロボットにはない力触覚機能という付加価値を持ったシステムのデザインを進め、雛型としての実験機の開発を達成します。in vivo での臨床試験を実施し、有用性を実証することを目標としています。
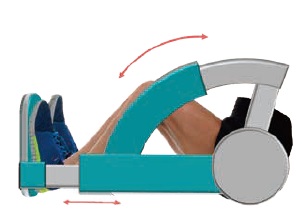
4. 介護福祉支援ロボットの開発
有望シーズ展開事業では、リハビリテーションや住環境での日常動作を支援するロボットの開発を行いました。リハビリテーションが必要とされる麻痺患者の多くは、四肢を伸ばす訓練を行います。このとき、ロボットが人間の動作を阻害するように動いてしまっては患者に負荷がかかるばかりでなく、本来リハビリテーションを施すはずの筋や関節を痛める結果になりかねません。コンソーシアム企業とも連携し、実用化を見据えながら柔らかい運動支援を実現するリハビリテーション支援ロボットの研究を進めました。また、介護分野において希求されている歩行支援や起き上がり、立ち上がり支援などを実現する装置の研究・試作を行いました。